An Dang
I am currently a first-year Robotics PhD student studying at the University of Michigan, Ann Arbor (where I also received my Robotics M.S.). I work under Professor Nima Fazeli at the Manipulation and Machine Intelligence (MMint) Lab. I received my B.S. in Computer Science from the University of California, Irvine in 2023.
LinkedIn
Github
andang@umich.edu
Hydrosoft: Non-Holonomic Hydroelastic Models for Compliant Tactile Manipulation
Miquel Oller, An Dang, Nima Fazeli
Hydrosoft is a computationally efficient, path-dependent, and differentiable model for simulating and controlling soft, compliant robotic components in dexterous manipulation tasks.
Webpage •
PDF •
Code (Soon)
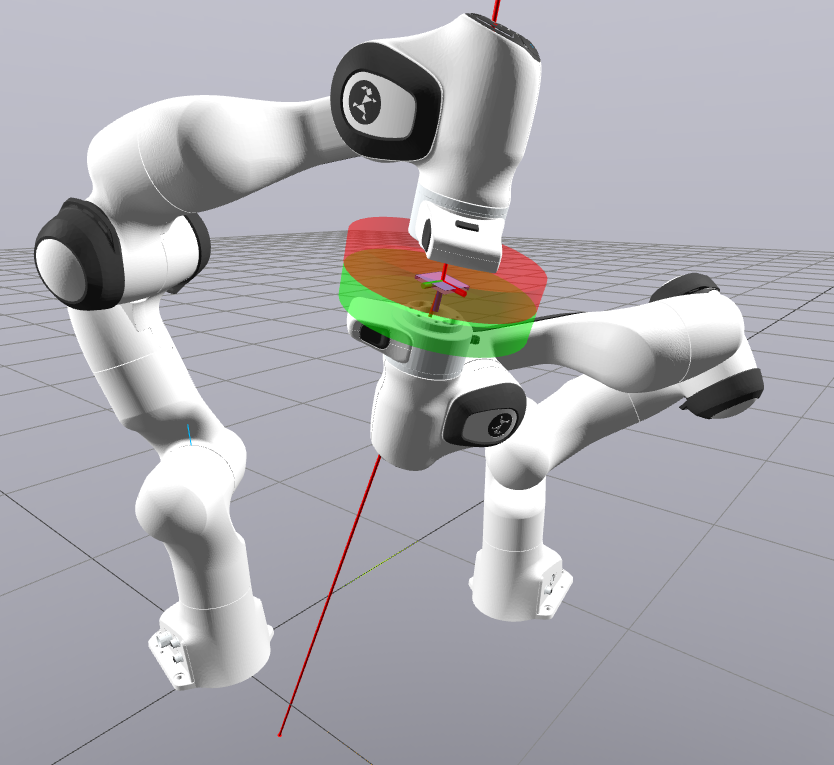
Bimanual In-hand Manipulation using Dual Limit Surfaces
An Dang, James Lorenz, Xili Yi, Nima Fazeli (Arxiv Only)
Performing slippage-free optimization-based planning through patch contact modelling.
Webpage •
PDF •
Code
.gif)
Dual asymmetric limit surfaces and their applications to planar manipulation
Xili Yi, An Dang, Nima Fazeli
Patch contact modelling for tabletop manipulation (extended to incline surfaces).
PDF •
Code

Object Tracking on Augmented Reality Headset (Microsoft Hololens 2)
An Dang, Justin Yue
Implemented object tracking algorithms onboard Hololens 2 device and added visualization for user interaction.
Code
UAV Forge (Computer Vision) 2022
An Dang, Vincent Chen
Combining Yolov5 with classical computer vision techniques to detect/segment out objects, extract inscribed letters, and localize object in real world.
Code